针对自动驾驶落地难点问题 智行者两篇论文入选顶级国际会议ICRA2023
完美作业网有免费视频2023年3月6日获悉,智行者团队发布的两篇论文近日被顶级国际会议ICRA 2023接收,分别为《Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels》和《Anderson Acceleration for on-Manifold Iterated Error State Kalman Filters》。两篇论文针对自动驾驶落地中的难点问题,分别提出了一种基于增量体素的高效率激光雷达惯导里程计和一种基于Anderson加速的迭代扩展卡尔曼滤波。
IEEE国际机器人与自动化协会每年主办一次IEEE世界机器人与自动化大会(IEEE InternationalConference on Robotics and Automation,简称IEEE ICRA)。IEEE ICRA是机器人领域规模(千人以上)和影响力均排名第一的顶级国际会议,是机器人领域权威研究人员介绍其研究成果的首要国际论坛。

Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels
本文提出了一种基于增量体素的激光雷达惯导里程计(LIO)方法,用于快速跟踪旋转和固态激光雷达扫描点云,为了获得较高的跟踪速度,本文既不使用复杂的基于树的结构来划分空间点云,也不使用严格的k近邻(k-NN)查询来计算点匹配。
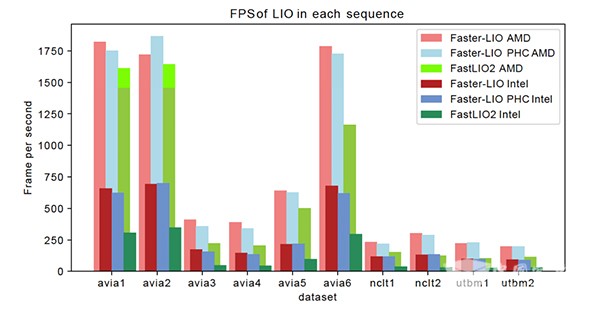
使用增量体素(iVox)作为点云空间数据结构,它是从传统体素修改而来的,支持增量插入和并行近似k-NN查询,本文在算法中提出了线性iVox和PHC(伪希尔伯特曲线)iVox作为两种可选的底层结构。
实验表明,在固态激光雷达中,iVox的每次扫描速度达到1000-2000HZ,而在32线激光雷达中,iVox的速度超过200赫兹(仅使用现代CPU),同时仍保持相同的精度水平!
Anderson Acceleration for on-Manifold Iterated Error State Kalman Filters
本文指出,迭代扩展卡尔曼滤波器(Iterated Extended Kalman Filter)是一种被广泛应用于实时定位应用中的估计器,它通过多次迭代观测方程,以找到更好的线性化点,每次只进行当前时间点的状态估计,从而节省计算资源。
受最近迭代最近点算法(iterative closest point algorithm)的启发,本文提出一种加速迭代误差状态卡尔曼滤波器(IESKFs)的方法。
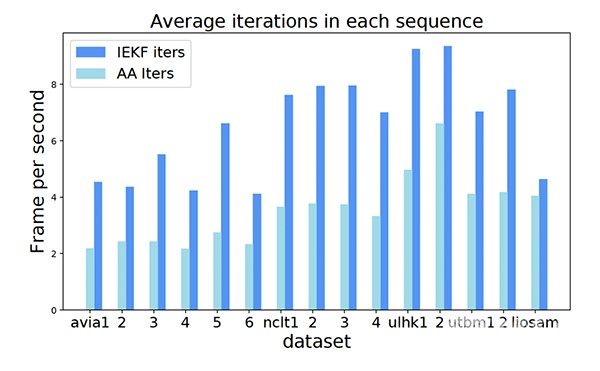
研究结果表明,IESKF可以转换为一个迭代不动点问题,从而使得Anderson加速(AA)可以直接应用于IESKF的迭代,因为IESKF的误差状态自然存在于切空间中,而不需要额外的变换。
但在迭代期间,当前估计的切空间可能会发生变化,因此本文应该将切空间转换到起始点来执行Anderson加速。文章提出了AA-IEKF,并将其应用于激光雷达惯性惯性里程计(LIO)系统来估计激光雷达的本体运动。实验表明,Anderson加速可以有效减少ESKF的迭代次数,并降低总计算量。
1、凡本网注明“来源:www.beltsegypt.com” 的所有作品,版权均属于完美作业网有免费视频,未经本网授权,任何单位及个人不得转载、摘编或以其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:www.beltsegypt.com”。违反上述声明者,本网将追究其相关法律责任。
2、凡本网注明 “来源:XXX(非完美作业网有免费视频)” 的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。
3、如因作品内容、版权和其它问题需要同本网联系的,请在30日内进行。
※ 有关作品版权事宜请联系:copyright#chinabuses.com
- 陈剑出任北京福田康明斯发动机有限公司总经理[09-27]
- 陈华出任康明斯中国供应链、质量和信息技术执行总监[09-26]
- 成都客车森鹏电子共携手 绘制海外绿色交通新篇章[09-26]
- 逐鹿欧美市场 精进电动耀动2024汉诺威商用车展[09-26]
- 玉柴参加“与中国驻东盟经商参赞面对面”交流会[09-26]
- 北京祥龙公司与宁德时代签署战略合作协议[09-26]
- 媒体关注:从未势能源看中国氢能企业的全球化之路[09-25]
- 尽显“全天候”品质 欧辉BJ6105确实有点大不同 [09-25]

















